赤外線リモコン用デバイスを使った動体検知 (1)
赤外線リモコン用デバイスを利用した動体検知システムを製作しました。
検出原理はいたって簡単で、ある程度指向性の強い赤外線送信機と受信機を向かい合わせに置き、物体の侵入で赤外線受信が途絶えたら検出と判定するものです。
写真1が今回製作したもので、IR受信機は2つの受光器で2つのIR送信機からの信号を受けることができ、赤外線が遮断されるとTWELITEを使った無線で親機に検知信号が送信されます。
IR到達距離は晴天時で約24mありましたが、場所がないのでその距離での長時間の性能確認はできておりません。
自宅庭に設置した距離10m程度での確認では 少し強い雨でも通信が途絶えることはありませんでした。雨でなくても稀に通信が途絶えて誤検知が起きるかと思ったのですが、意外と安定した通信ができているようです。
写真1 赤外線リモコンデバイスを使った動体検知装置

== 回路 ==
図1,図2に赤外線を使った動体検知システムの回路を、図3にIR信号のタイミング構成を示します。
(2023.05.06 訂正) 回路図中 PIC12F8140 とありますが誤りです。 PIC12F1840-I/P が正しいです。
図1 IR送信回路
.jpg)
図2 IR受信・TWELITE送信回路
.jpg)
図3 IR信号波形
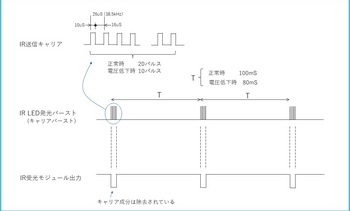
IR送信部はPICを使いリモコンで使うキャリア周波数38kHzの光バーストを一定間隔で赤外線LEDより送信します。それをIR受光モジュールで受光して電気信号への変換とキャリアの除去を行い、その信号をPICに入力します。(図3)
IR受信機のPICは信号が定期的に届いているかを監視し、途絶えたらTWELITE経由で検知信号を親機に送信します。
IR受信機の赤いLEDは設置調整時に赤外線の受信状態を示すためのもので受信時は赤く光ります。
受光器1,2のOR出力ですので、確認しない方の受光器は遮光するかコネクタを抜いて回路を遮断しておきます。
IR送信機の電池電圧は分圧してPICのADC(AN3)に印加され、電圧が規定値より低くなるとキャリアのバーストパルスの数を減らし且つバーストのインターバルを短くすることでIR受信機に状態を伝達します。
IR受信機では2つのIR送信機の電池電圧状態に応じてアナログ電圧を出力(DAT)し、これをTWELITEのアナログ入力AI2(ADC)に印加して親機に情報伝達します。
IR受信機の電池電圧は分圧してTWELITEのアナログ入力AI1(ADC)に印加して親機に情報伝達します。
PICのICSP(In-Circuit Serial Programing)用にコネクターを設けてあります(赤紫の回路)が、外部でプログラムを行う場合は不要です。
IR送受信機共にソーラーパネルを接続できるようになっていますが回路はLR0GC02 (Sharp製) 専用です。
(注意) ソーラーパネルを接続する際には必ずニッケル水素電池を使用し、危険ですからDC5Vや乾電池を接続しないでください。
== 製作 ==
製作資料は下記にて参照・ダウンロードできます。
・基板製作
・組み立て
猿検知センサーの設置をしたときに、センサーの構造が平地を前提にしたものであったため傾斜地では斜めに設置しなければならず、重心の位置が悪くなって倒れやすくなったり防水上も余り良くありませんでした。
そこで今回は傾斜地にも設置し易い構造にしたのですが、そのためにIR送信機は収納ケースが少し大きくなってしまい、IR受光部は角度をつけやすいように受信信号処理部と分離してしまいました。
これらの回路基板自体は小さいので、IR送信機とIR受信機をほぼ水平に設置できるのであればIR受信機は受光部と受信信号処理部を1つのケースに入れてコンパクトな構造にすることができます。
ただし、受光モジュールに太陽光などの外光が入ると誤動作するので遮光筒は必要です。
さらに赤外線はモジュール前面のみならず側面や背面からも入り込みますのでその遮光も必要です。(今回の製作ではケース内にアルミ蒸着フィルム(菓子の袋)を貼りました。)
プラスチック製の遮光筒も赤外線が減衰はするものの透過するので、露出するのであればその周りをアルミ蒸着フィルムなどで遮光した方がよいでしょう。
//<2023.05.16追記>
アルミ蒸着フィルムは 物によっては赤外線を通してしまうので確認して使ってください。場合によってはアルミ箔の方が良いかもしれません。//
== ソフトウェア ==
IR送受信機にはPICを使っているのでそれ用のソフトウェアと、親機は「ESP32 & 2.8" G_LCD一体型ユニットの製作 」で作ったユニット用ESP32 のソフトウェアを作りました。
ダウンロードはこちらで行えます。 (2023.05.16 更新)
<2023.10.02記>「PICライター(PICerFT)の製作」でPICライターの自作方法を紹介しています。
//<2023.05.16追記>
より実用的な親機用ソフトとしては「各種動体検知装置に対応した統合型親機」のものが使えます。(回路タイプ番号 3で設定) //
今回初めてPICを使いました。プロジェクトのオープン方法や遭遇したIDEがらみのトラブル2件の対応を書いておきました。 => こちら
IDEのインストールや使用法はご自身でお調べください。
PICは消費電流を減らすためにCPUクロックを2MHzで使用しています。
そのため処理速度が遅くなってタイマーや処理方法に制約があり、IR送信機の電池電圧低下情報の伝達はバーストパルスの送信インターバルを100mSecから 80mSec程度にし且つパルス数を20から10に減らすことで対応する事にしました。
親機としては一部の猿検知通報装置用のもの(最終仕様版)も使用可能ですが、IR送信機の電池電圧の状態は表示されません。
(「Panasonic PaPIRsセンサーを送信回路2A タイプで使うモード」に準じた設定で使用できます。)
TWELITEは標準アプリで使用し、インターラクティブモードでの設定は子機のみ必要で、送信間隔(t: set mode4 sleep dur )を 10,000mSに設定します。
== 課題 ==
1. 電池での長期使用ができない。特に受光モジュールの電流が大きいようで、受光モジュールを2個使う場合は単三アルカリ電池で1週間持つかどうかです。
ソーラーパネルを使って電源メンテナンスフリーができるかどうかの検討をしようと思います。
2. 20cmぐらいの鳥が飛んできて検知しました。
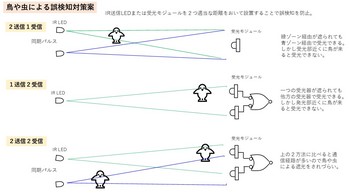
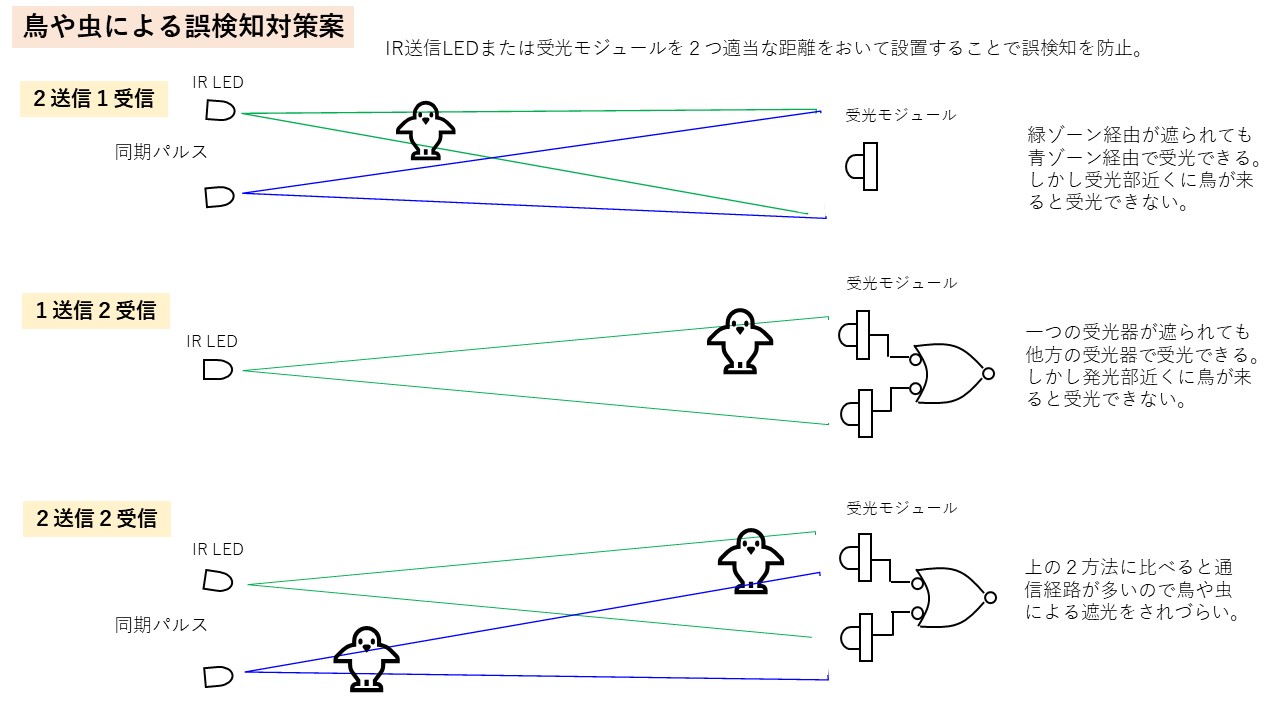
図4のような方法で改善できないかを検討しようと思います。
図4 鳥や虫などの検知防止方法
>> ブログ記事一覧へ
検出原理はいたって簡単で、ある程度指向性の強い赤外線送信機と受信機を向かい合わせに置き、物体の侵入で赤外線受信が途絶えたら検出と判定するものです。
写真1が今回製作したもので、IR受信機は2つの受光器で2つのIR送信機からの信号を受けることができ、赤外線が遮断されるとTWELITEを使った無線で親機に検知信号が送信されます。
IR到達距離は晴天時で約24mありましたが、場所がないのでその距離での長時間の性能確認はできておりません。
自宅庭に設置した距離10m程度での確認では 少し強い雨でも通信が途絶えることはありませんでした。雨でなくても稀に通信が途絶えて誤検知が起きるかと思ったのですが、意外と安定した通信ができているようです。
写真1 赤外線リモコンデバイスを使った動体検知装置

== 回路 ==
図1,図2に赤外線を使った動体検知システムの回路を、図3にIR信号のタイミング構成を示します。
(2023.05.06 訂正) 回路図中 PIC12F8140 とありますが誤りです。 PIC12F1840-I/P が正しいです。
図1 IR送信回路
.jpg)
図2 IR受信・TWELITE送信回路
.jpg)
図3 IR信号波形
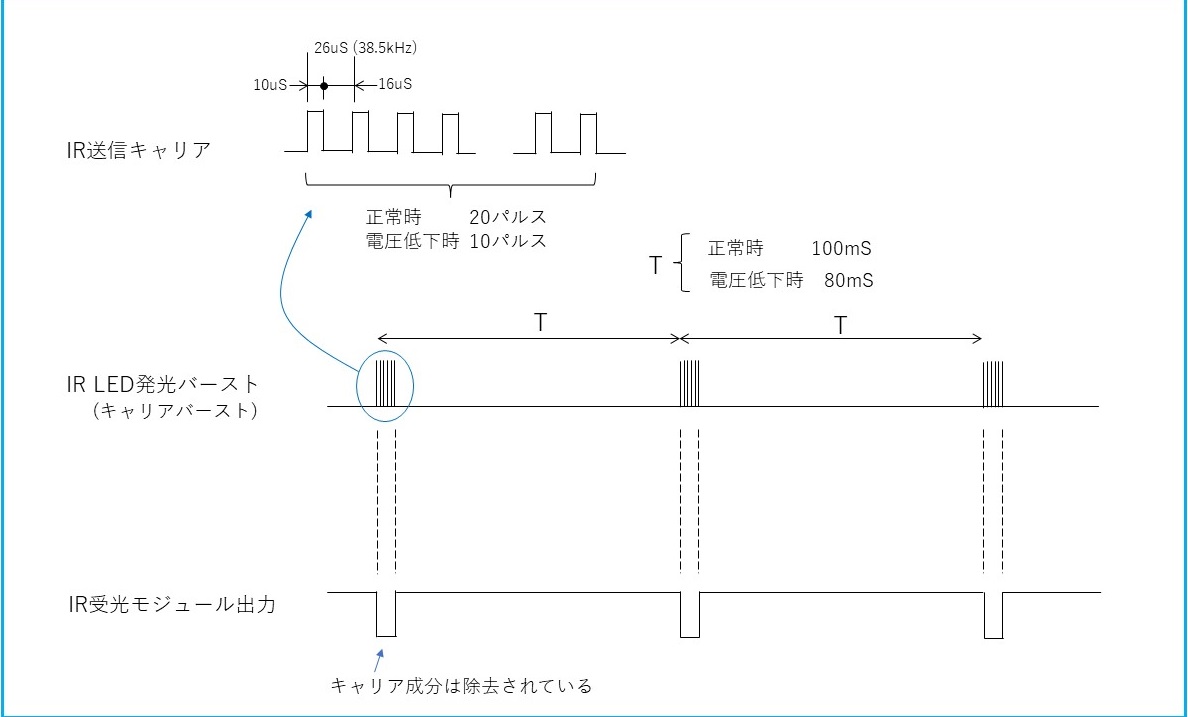
IR送信部はPICを使いリモコンで使うキャリア周波数38kHzの光バーストを一定間隔で赤外線LEDより送信します。それをIR受光モジュールで受光して電気信号への変換とキャリアの除去を行い、その信号をPICに入力します。(図3)
IR受信機のPICは信号が定期的に届いているかを監視し、途絶えたらTWELITE経由で検知信号を親機に送信します。
IR受信機の赤いLEDは設置調整時に赤外線の受信状態を示すためのもので受信時は赤く光ります。
受光器1,2のOR出力ですので、確認しない方の受光器は遮光するかコネクタを抜いて回路を遮断しておきます。
IR送信機の電池電圧は分圧してPICのADC(AN3)に印加され、電圧が規定値より低くなるとキャリアのバーストパルスの数を減らし且つバーストのインターバルを短くすることでIR受信機に状態を伝達します。
IR受信機では2つのIR送信機の電池電圧状態に応じてアナログ電圧を出力(DAT)し、これをTWELITEのアナログ入力AI2(ADC)に印加して親機に情報伝達します。
IR受信機の電池電圧は分圧してTWELITEのアナログ入力AI1(ADC)に印加して親機に情報伝達します。
PICのICSP(In-Circuit Serial Programing)用にコネクターを設けてあります(赤紫の回路)が、外部でプログラムを行う場合は不要です。
IR送受信機共にソーラーパネルを接続できるようになっていますが回路はLR0GC02 (Sharp製) 専用です。
(注意) ソーラーパネルを接続する際には必ずニッケル水素電池を使用し、危険ですからDC5Vや乾電池を接続しないでください。
== 製作 ==
製作資料は下記にて参照・ダウンロードできます。
・基板製作
・組み立て
猿検知センサーの設置をしたときに、センサーの構造が平地を前提にしたものであったため傾斜地では斜めに設置しなければならず、重心の位置が悪くなって倒れやすくなったり防水上も余り良くありませんでした。
そこで今回は傾斜地にも設置し易い構造にしたのですが、そのためにIR送信機は収納ケースが少し大きくなってしまい、IR受光部は角度をつけやすいように受信信号処理部と分離してしまいました。
これらの回路基板自体は小さいので、IR送信機とIR受信機をほぼ水平に設置できるのであればIR受信機は受光部と受信信号処理部を1つのケースに入れてコンパクトな構造にすることができます。
ただし、受光モジュールに太陽光などの外光が入ると誤動作するので遮光筒は必要です。
さらに赤外線はモジュール前面のみならず側面や背面からも入り込みますのでその遮光も必要です。(今回の製作ではケース内にアルミ蒸着フィルム(菓子の袋)を貼りました。)
プラスチック製の遮光筒も赤外線が減衰はするものの透過するので、露出するのであればその周りをアルミ蒸着フィルムなどで遮光した方がよいでしょう。
//<2023.05.16追記>
アルミ蒸着フィルムは 物によっては赤外線を通してしまうので確認して使ってください。場合によってはアルミ箔の方が良いかもしれません。//
== ソフトウェア ==
IR送受信機にはPICを使っているのでそれ用のソフトウェアと、親機は「ESP32 & 2.8" G_LCD一体型ユニットの製作 」で作ったユニット用ESP32 のソフトウェアを作りました。
ダウンロードはこちらで行えます。 (2023.05.16 更新)
<2023.10.02記>「PICライター(PICerFT)の製作」でPICライターの自作方法を紹介しています。
//<2023.05.16追記>
より実用的な親機用ソフトとしては「各種動体検知装置に対応した統合型親機」のものが使えます。(回路タイプ番号 3で設定) //
今回初めてPICを使いました。プロジェクトのオープン方法や遭遇したIDEがらみのトラブル2件の対応を書いておきました。 => こちら
IDEのインストールや使用法はご自身でお調べください。
PICは消費電流を減らすためにCPUクロックを2MHzで使用しています。
そのため処理速度が遅くなってタイマーや処理方法に制約があり、IR送信機の電池電圧低下情報の伝達はバーストパルスの送信インターバルを100mSecから 80mSec程度にし且つパルス数を20から10に減らすことで対応する事にしました。
TWELITEは標準アプリで使用し、インターラクティブモードでの設定は子機のみ必要で、送信間隔(t: set mode4 sleep dur )を 10,000mSに設定します。
== 課題 ==
1. 電池での長期使用ができない。特に受光モジュールの電流が大きいようで、受光モジュールを2個使う場合は単三アルカリ電池で1週間持つかどうかです。
ソーラーパネルを使って電源メンテナンスフリーができるかどうかの検討をしようと思います。
2. 20cmぐらいの鳥が飛んできて検知しました。
図4のような方法で改善できないかを検討しようと思います。
図4 鳥や虫などの検知防止方法
>> ブログ記事一覧へ



