ポータブルミリ波レーダーの製作(1)
「ミリ波レーダーを使った動体検知システム (5/5)」で製作したレーダーを自宅の塀に設置したもののその後ほとんど活用していませんでした。
レーダーの親機のモニターは他の用途で使ってしまってレーダーのグラフを見ることは無かったですし、家の周りのセキュリティはカメラやこれまでに作った焦電センサーシステムで十分監視できていたこともあります。
1年以上経って親機をつないだら健気にもちゃんとデータを送って来ていて、もっと使ってやらなきゃと思いました。しかし自宅の周りに設置していたら新たな用途はなさそうなので外に持ち出してみようと思い、そのためにはまずポータブルなシステムにしなければならないと考え これを今回の製作テーマにしました。
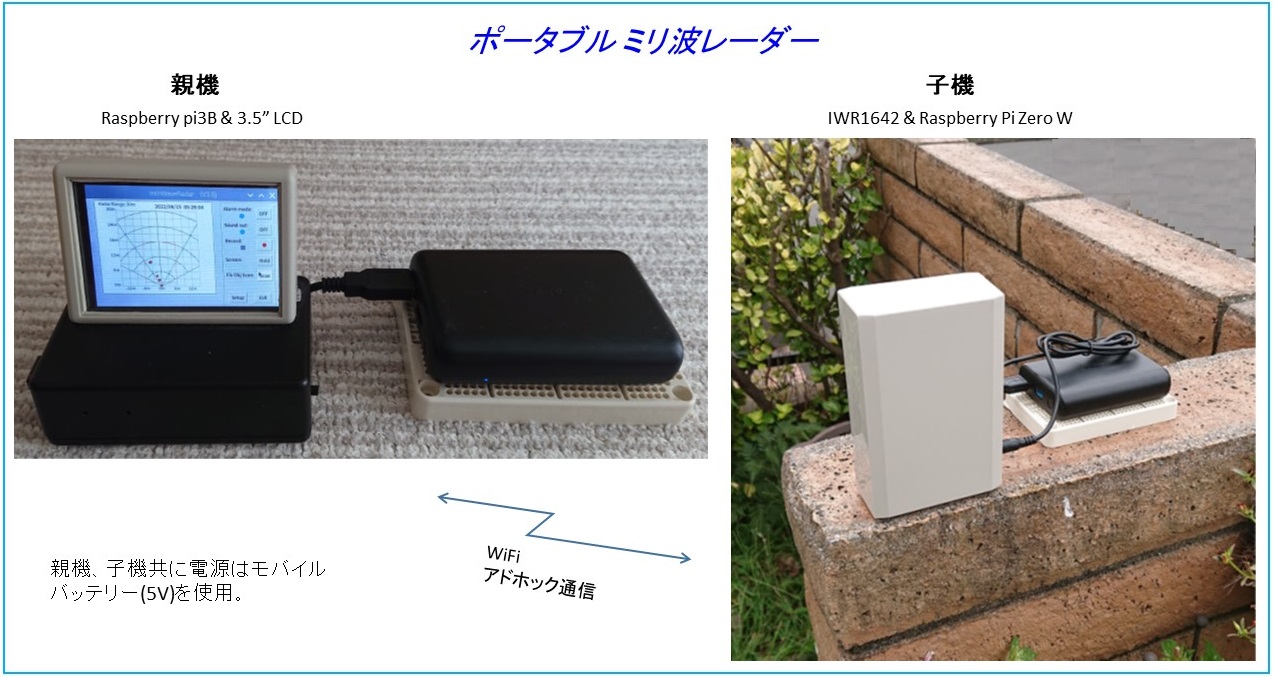
写真1は製作したミリ波レーダーの親機・子機です。電源はモバイルバッテリーなので時間の制約はありますが使用場所の自由度は広がりました。
写真1

システムは、「ミリ波レーダーを使った動体検知システム(5/5)」のものからESP32とMONO TWELITEを外してRaspberry Pi Zero WによるUDP通信を行う子機と「Raspi3&3.5"Monitor一体型ユニットの製作」で作ったユニット(MONO TWELITEは削除)の親機、それと電源を供給するモバイルバッテリーで構成されます。
「Raspi3&3.5"Monitor一体型ユニットの製作」のユニットはレーダーデータのUDP信号を受信し続けるとCPUの温度が上がって温度計マークが表示されました。動物検知システムの親機に使った場合は問題なかったのですが、今回は処理がかなり増えているものと思われます。 追加回路の基板が詰め込んであって通風が良くないのでこのケースサイズと収納構造はお奨め致しません。別方法をご検討ください。
(2023.03.19追記) ESP32&3.5"LCDユニットを使った親機を「ポータブルミリ波レーダーの製作(2)」で作りました。
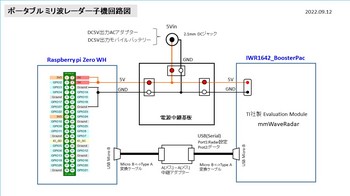
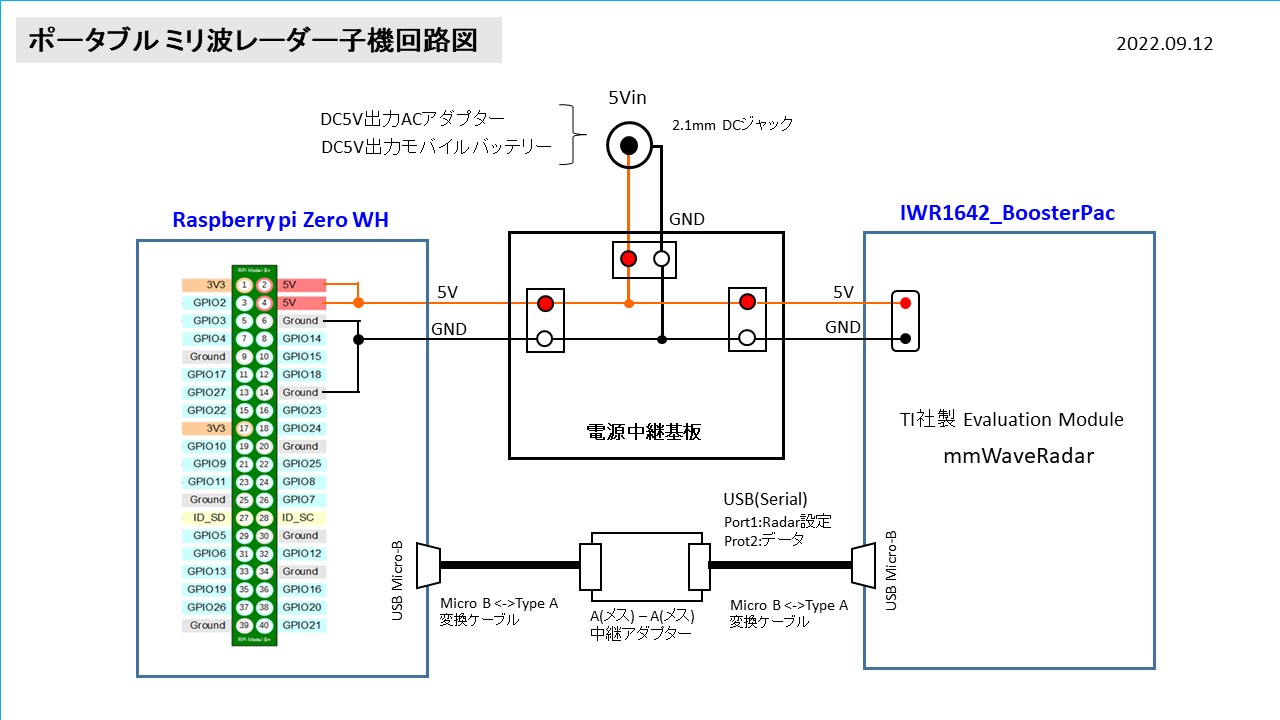
図1に今回製作した子機の回路図(というより接続図)を示します。かなりシンプルになりました。
図1 子機回路
製作関連資料・ソフトウェアは以下からダウンロードできます。
・子機製作方法 => ダウンロード
・設定・使用方法 => ダウンロード
・ソフトウェア => ダウンロード ・・・要修正(2023.02.27)
(子機製作)
製作自体は以前のものに比べれば簡単になっているのですが、ケースの選定に意外と苦労しました。できるだけ小さなケースに入れたいと思ったのですがレーダー基板が入るサイズとなるとどうしても若干大きめの物しか見当たらず、また場合によっては防水対策を施して屋外に常設することも考えたりすると薄いケースでは使えず、最終的にTAKACHIのPR140Gを使う事にしました。
ケース選択の際にはレーダーアンテナの上下横、斜め前方にケースの金属物(ビスやナット等)が無い事も大事ですので注意してください。
(バッテリー)
モバイルバッテリー Anker PowerCore 15000 Redux (15000mAh)をフル充電して子機と親機の動作時間を調べてみました。
子機は 約14.5時間、親機は約15.5時間でした。
バッテリーと機器との接続ケーブルには注意が必要です。
親機のRaspberry Pi 3B用に手元にあったUSBケーブルを使ったところ画面右上に稲妻マークが現れました。電圧低下のサインとの事であったのでケーブルをバッテリー付属の短いものに交換したところマークが消えました。
子機用のケーブルはUSB type A - 2.1mm DCジャックタイプのケーブル(約90cm、5V/2A)を使いましたが Raspberry Pi Zero W には稲妻マークは出ませんでした。ただレーダーの電流もそこそこ流れるので 2A 品では心配なこともあり、様子を見て場合によってはケーブルを短く詰めようと思います。
ともあれ、ケーブル内の電源ラインの抵抗には気を遣ってください。
バッテリー使用で気懸りな点に蓄電量が減った時のシャットダウン特性がありました。
回路によっては中途半端な電源電圧がある程度長い時間入力されていると(例えば5+/-0.2V が規定入力電圧の場合4Vや3Vといった電圧が供給され続ける)故障するものがあります。
今回使ったモバイルバッテリーの場合電圧は5Vからほとんど垂直に2Vまで低下し、その後3秒ぐらいで0.1V程度になるので問題なさそうです。(全てのモバイルバッテリーが同じような特性かどうかはわかりませんので注意してください。)
(アドホック通信)
どこでも子機・親機のWiFi UDP通信ができるようにするためにはアドホック モードの通信ができるようにしなければなりませんでした。この方法を確立するのに結構時間を費やし、せっかくなのでこの件だけで1記事にしました。(「Paspberr pi 同士のアドホック通信」参照。)
通信距離は子機と親機の位置関係や両Raspberry piのアンテナ周辺のヒートシンクなど金属物の影響によって左右されます。子機の背面方向 障害物無し状態で10mぐらいの距離では問題なく通信できました。最大距離は未確認です。
親機側の搭載WiFiアンテナの状態が良くない場合は、それなりのアンテナの付いたUSBタイプの無線LANアダプターを使えば通信の改善ができると思います。
(2022.10.09追記)
Raspberry piを使った子機・親機間の直接通信は記事「Raspi,ESP32のAPモードを使った1対1WiFi通信」内に示すようなAPモードを使った方法でも可能です。
こちらの方がアドホック通信より設定がシンプルになり、特に子機はSSIDを選んでKeyを入力するだけで通常のWiFi接続設定と同じです。
既にアドホック通信設定をしてある場合でAPモード方式に変更する場合はまず「Raspberry pi 同士のアドホック通信」の設定資料を参照して関連ファイル類を削除(シェルスクリプトの"./uninstall.sh"を実行)し、 親機は更に udhcpd を削除(purge)してアドホック設定以前の状態に戻してから APモード設定をしてください。
===== 関連記事 =====
ミリ波レーダーを使った動体検知システム(1/5)
ミリ波レーダーを使った動体検知システム(2/5)
ミリ波レーダーを使った動体検知システム(3/5)
ミリ波レーダーを使った動体検知システム(4/5)
ミリ波レーダーを使った動体検知システム(5/5)
>> ブログ記事一覧へ
レーダーの親機のモニターは他の用途で使ってしまってレーダーのグラフを見ることは無かったですし、家の周りのセキュリティはカメラやこれまでに作った焦電センサーシステムで十分監視できていたこともあります。
1年以上経って親機をつないだら健気にもちゃんとデータを送って来ていて、もっと使ってやらなきゃと思いました。しかし自宅の周りに設置していたら新たな用途はなさそうなので外に持ち出してみようと思い、そのためにはまずポータブルなシステムにしなければならないと考え これを今回の製作テーマにしました。
写真1は製作したミリ波レーダーの親機・子機です。電源はモバイルバッテリーなので時間の制約はありますが使用場所の自由度は広がりました。
写真1
システムは、「ミリ波レーダーを使った動体検知システム(5/5)」のものからESP32とMONO TWELITEを外してRaspberry Pi Zero WによるUDP通信を行う子機と「Raspi3&3.5"Monitor一体型ユニットの製作」で作ったユニット(MONO TWELITEは削除)の親機、それと電源を供給するモバイルバッテリーで構成されます。
「Raspi3&3.5"Monitor一体型ユニットの製作」のユニットはレーダーデータのUDP信号を受信し続けるとCPUの温度が上がって温度計マークが表示されました。動物検知システムの親機に使った場合は問題なかったのですが、今回は処理がかなり増えているものと思われます。 追加回路の基板が詰め込んであって通風が良くないのでこのケースサイズと収納構造はお奨め致しません。別方法をご検討ください。
(2023.03.19追記) ESP32&3.5"LCDユニットを使った親機を「ポータブルミリ波レーダーの製作(2)」で作りました。
図1に今回製作した子機の回路図(というより接続図)を示します。かなりシンプルになりました。
図1 子機回路
製作関連資料・ソフトウェアは以下からダウンロードできます。
・子機製作方法 => ダウンロード
・設定・使用方法 => ダウンロード
・ソフトウェア => ダウンロード ・・・要修正(2023.02.27)
(子機製作)
製作自体は以前のものに比べれば簡単になっているのですが、ケースの選定に意外と苦労しました。できるだけ小さなケースに入れたいと思ったのですがレーダー基板が入るサイズとなるとどうしても若干大きめの物しか見当たらず、また場合によっては防水対策を施して屋外に常設することも考えたりすると薄いケースでは使えず、最終的にTAKACHIのPR140Gを使う事にしました。
ケース選択の際にはレーダーアンテナの上下横、斜め前方にケースの金属物(ビスやナット等)が無い事も大事ですので注意してください。
(バッテリー)
モバイルバッテリー Anker PowerCore 15000 Redux (15000mAh)をフル充電して子機と親機の動作時間を調べてみました。
子機は 約14.5時間、親機は約15.5時間でした。
バッテリーと機器との接続ケーブルには注意が必要です。
親機のRaspberry Pi 3B用に手元にあったUSBケーブルを使ったところ画面右上に稲妻マークが現れました。電圧低下のサインとの事であったのでケーブルをバッテリー付属の短いものに交換したところマークが消えました。
子機用のケーブルはUSB type A - 2.1mm DCジャックタイプのケーブル(約90cm、5V/2A)を使いましたが Raspberry Pi Zero W には稲妻マークは出ませんでした。ただレーダーの電流もそこそこ流れるので 2A 品では心配なこともあり、様子を見て場合によってはケーブルを短く詰めようと思います。
ともあれ、ケーブル内の電源ラインの抵抗には気を遣ってください。
バッテリー使用で気懸りな点に蓄電量が減った時のシャットダウン特性がありました。
回路によっては中途半端な電源電圧がある程度長い時間入力されていると(例えば5+/-0.2V が規定入力電圧の場合4Vや3Vといった電圧が供給され続ける)故障するものがあります。
今回使ったモバイルバッテリーの場合電圧は5Vからほとんど垂直に2Vまで低下し、その後3秒ぐらいで0.1V程度になるので問題なさそうです。(全てのモバイルバッテリーが同じような特性かどうかはわかりませんので注意してください。)
(アドホック通信)
どこでも子機・親機のWiFi UDP通信ができるようにするためにはアドホック モードの通信ができるようにしなければなりませんでした。この方法を確立するのに結構時間を費やし、せっかくなのでこの件だけで1記事にしました。(「Paspberr pi 同士のアドホック通信」参照。)
通信距離は子機と親機の位置関係や両Raspberry piのアンテナ周辺のヒートシンクなど金属物の影響によって左右されます。子機の背面方向 障害物無し状態で10mぐらいの距離では問題なく通信できました。最大距離は未確認です。
親機側の搭載WiFiアンテナの状態が良くない場合は、それなりのアンテナの付いたUSBタイプの無線LANアダプターを使えば通信の改善ができると思います。
(2022.10.09追記)
Raspberry piを使った子機・親機間の直接通信は記事「Raspi,ESP32のAPモードを使った1対1WiFi通信」内に示すようなAPモードを使った方法でも可能です。
こちらの方がアドホック通信より設定がシンプルになり、特に子機はSSIDを選んでKeyを入力するだけで通常のWiFi接続設定と同じです。
既にアドホック通信設定をしてある場合でAPモード方式に変更する場合はまず「Raspberry pi 同士のアドホック通信」の設定資料を参照して関連ファイル類を削除(シェルスクリプトの"./uninstall.sh"を実行)し、 親機は更に udhcpd を削除(purge)してアドホック設定以前の状態に戻してから APモード設定をしてください。
===== 関連記事 =====
ミリ波レーダーを使った動体検知システム(1/5)
ミリ波レーダーを使った動体検知システム(2/5)
ミリ波レーダーを使った動体検知システム(3/5)
ミリ波レーダーを使った動体検知システム(4/5)
ミリ波レーダーを使った動体検知システム(5/5)
>> ブログ記事一覧へ



