猿検知通報装置関連まとめ
猿検知関連の記事をいくつか書いてきましたが、この辺でこのプロジェクトの整理をして一区切りつけようと思います。
<センサー子機>
(子機回路)
センサー子機回路に関しては改良をしながらいくつか紹介したので混乱しやすかったと思います。
また、これまで電池2系統持ったりセンサーを仕様外の電圧で使用するという事がありましたが、これらも解決して最終的な回路にしました。 => 参照
ちょっとバリエーションが多いですが。
<2023.01.18追記>
「PaPIRs焦電センサーを使った無線子機の製作(最新仕様)」で、子機の小型化、ソーラー電源化を含めた内容を書きました。
<2023.06.20追記>
自作センサー回路につきましては「自作焦電センサー回路を使った動体検知」で最新仕様の回路を紹介しています。
<追記終わり>
(センサー)
自作センサー回路では超高感度フレネルレンズAE-01(AK-FL1)を用いていたのですが、検出距離は大きいものの視野角が比較的広いので目標ゾーンを狭めるためにレンズ前に遮光筒を付けた事と回路が大きめになったためにケースが大きくなりました。(「猿検知通報装置 新子機製作」参照)
その後この超高感度フレネルレンズが入手できない事態になり、代替品として見つけたのがPanasonicのEKMC1603111です。
これは検出距離は人間(大人)で10数メートルと自作回路品(20数m)より短くなりますが、検出回路内蔵のデバイスなので回路をシンプルにでき、またマルチレンズの中央の一つのレンズを使うようにすることで検出範囲が絞られるのでレンズ前の遮蔽距離を短くできてケースを小さめにできます。市場購入が可能で検出性能と回路性能も良いので今後はこれか、シリーズ品のEKMC1604111、EKMB1303111K等を使いたいと思っています。(EKMC1603111 以外は値段がちょっと高いかもしれません。今回使ったEKMB1303111Kは秋月電子でEKMB1301111K(1,080円)とEKMC1603111(520円)を購入し、前者のセンサーと後者のレンズを組み合わせて作ったものです。)
レンズ取り付け向き変更の改造は必要です。 改造内容などはこちらを参照願いいます。
<2023.07.02追記>
PaPIRsは草木の揺れや入射光による誤検出が少ないようです。 PaPIRsの2センサー検出については「猿検知装置用センサーの代替品」を参照願います。<追記終わり>
(ケース収納)
子機のケースは主にセンサーのタイプと数、電池寿命(電池サイズ)、ソーラー電源かどうかによって形状や大きさが決まります。
<参考> 塩ビパイプ(VU管)への電池収納形態 (2022.11.08追加)
ソーラーパネル電源を用いた子機を円筒形にしたのは、センサーの向きとアンテナの位置関係を固定せずアンテナの影がソーラーパネル上にあまり出来ないような向きにアンテナ位置を持ってこられるからです。
電池を用いた子機のケースは円筒形であっても角型形状であってもよいのですが、加工面では角型の方がしやすかったです。
ケース加工については後述の「最新の子機製作例」を参考にできると思います
(標準アプリかTagアプリか)
TWELITEを猿検知通報システムに使う際には標準アプリとTagアプリのいずれかのアプリケーションを使う事になります。
標準アプリでは検出イベントが起きた時以外にA/Dデータなどを定期的に親機に送る機能(初期設定では5秒に一度)があり、更にその際に親機のDIデータを子機に送る事もできます。
これによって子機の電源電圧を監視でき、子機のセンサー回路の電源を夜間はOFFするといったことも可能になります。
(自作回路では親機からセンサー毎に検出感度を2,3ステップで切り替えられるようにすることも考えていましたが、回路が複雑になるのでやめました。また、PanasonicのセンサーICではそもそも感度切り替えが出来ません。)
一方Tagアプリではイベントが発生した時のみ親機にデータを送るようになっているので、消費電力は減りますが電圧の監視には不向きです。また 親機から子機にデータを送って子機を制御するようなことはできません。
更にTWELITEに4つあるDI端子のうち1つ(使い方によっては2つ)しか検出用に使えず、今回は抵抗分割でセンサー毎に異なる電圧をアナログ入力端子に加えて親機が判別できるようにしました。(標準アプリでは4つのDI端子に個別にセンサーを繋げられた。)
ソーラーパネルを電源に用いた回路では少しでも消費電力を減らして蓄電しようという意図からTagアプリを使いました。
(最新の子機製作例)
乾電池を使った場合と、ソーラー電源を使った場合の最新の製作例を紹介します。


乾電池を使った角型子機の製作 => 参照
ソーラー電源を使った円筒型子機の製作 => 参照
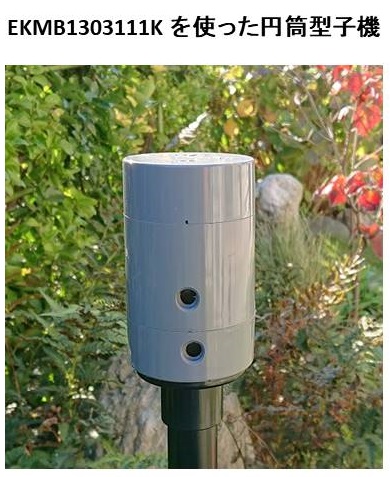
EKMB1303111Kを使った円筒型子機の製作 => 参照 (2020.11.7追加)
参考:乾電池2本化した円筒型子機 => 参照 (2022.12.07追加)
他のプロジェクト用子機ですが類似回路のもので、構造の参考になります。
ソーラー電源バージョンはこちらの記事の物です。
検証の結果、南向きで晴れた日には直射日光が3.5時間以上当たるような設置をした場合 電源のメンテナンスフリー化ができそうです。
乾電池バージョンではセンサー部と送信部のユニット化をし、これによって作りやすくなりました。
EKMB1303111Kを使った猿検知用子機(2センサー検出)の実験機を作り 単四電池を使い電池寿命試験をしたところ4か月以上は十分持ちそうな様子ですので、容量が単四の3倍程度はあるという単三電池を使えば1年以上持つと思われます。 そこで単三電池を使った子機をできるだけ小さく作ってみました。
<親機とソフトウェア>
(ハードウェア)
猿検出通報装置の親機は使用するボードPCよって3 5種類あります。
1. Raspberry pi3
2. ESP-WROOM-02開発ボード(ESP8266)
3. Arduino Nano または互換機
//2012.01.07 追記
4. ESP32 (キャラクターLCD)
5. ESP32 (2.8"グラフィックLCD)
詳細はリンク記事を参照願います。 //
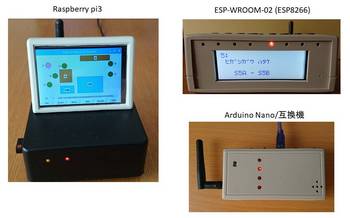
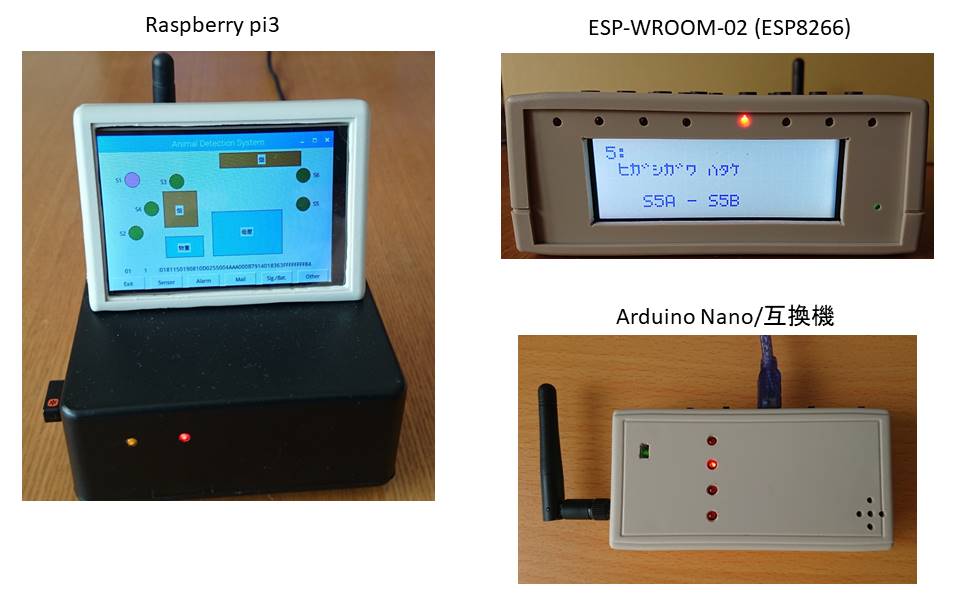
Raspberry pi ではグラフィック画面上に簡単なマップを表示しそこに検知点を表示できます。
ESP8266では検知点番号に対応するLEDと20文字x4列キャラクターLCDに英数字とカタカナで検知点情報表示できます。
Arduino Nano/互換機では 4つのLEDで検知点を示します。
基本機能表

プログラミングの勉強がてら3種類作りましたが、Raspberry piが一番実用的だと思います。
ESP8266のキャラクターLCD表示は半角カタカナ表示では瞬時に理解するのが難しく、むしろ英語の方が良いぐらいです。
Raspberry piを使った場合とESP8266を使った場合の親機の製作コストは、個人がデバイスを購入して作る場合は余り差がなかったと思います。
Arduino Nano/互換機は検知点数が少ない時(4ヵ所以下)に安価にできる親機として作りました。
<製作方法>
ハードウェア製作方法は次の記事を参照してください。
1. Raspberry pi3 => Raspi3&3.5"Monitor一体型ユニットの製作
2. ESP-WROOM-02(ESP8266) => ESP8266を使った猿検知通報システム親機の製作
3. Arduino Nano または互換機 => Arduino Nano互換機を使った簡易型親機の製作
(ソフトウェア)
親機にインストールするソフトウェアは子機のハードウェア構造によって異なります。
こちらの資料p2の表によって選択します。
<2020.09.26> ソフトウェアによっては修正が必要ですので、こちらを参照願います。
・ソフトウェアのダウンロード先
a) TWELITE標準アプリ使用の場合
Raspberry pi3 => ダウンロード (2022.07.28情報更新)
ESP-WROOM-02(ESP8266) => ダウンロード
Arduino Nano/互換機 => こちらから標準アプリ対応版をダウンロード
b) TWELITE Tagアプリ使用の場合
Raspberry pi3 = ダウンロード
ESP-WROOM-02(ESP8266) => ダウンロード
Arduino Nano/互換機 => こちらからTagアプリ対応版をダウンロード
・使用方法・設定方法などの説明
a) TWELITE標準アプリ使用の場合
関連記事内のソフトウェア、使用方法、設定などの項目を参照してください。
Raspberry pi3 => 猿検知通報装置の製作 および 猿検知通報装置の製作(電池寿命改善品)
ESP-WROOM-02(ESP8266) => ESP8266を使った猿検知通報システム親機の製作
Arduino Nano/互換機 => Arduino Nano互換機を使った簡易型親機の製作
b) TWELITE Tagアプリ使用の場合
ダウンロードしたソフトウェアパッケージ内にドキュメントがあります。
<TWELITE (DIP)のプログラムと設定>
TWELITEにプログラムを書き込んだりインタラクティブモードで設定をする際にはTWELITE Rが必要です。
インタラクティブモードについてはこちらを参照。
(標準アプリ使用の場合)
必要に応じて子機のTWELITEに標準アプリを書き込み(購入時は標準アプリになっている)、インタラクティブモードで次の設定をします。
(1) 子機を特定するのに論理デバイス番号を使う場合は1から順に付ける。 個体識別番号(シリアル番号)で特定する場合は不要。
(2) 子機間欠1秒モードの間欠時間を 10,000ms に設定する。
(3) オプションビット設定でDI1 ~ 4 のプルアップ停止する。(設定値 0x00000800)
親機のTWELITEは、親機から子機のセンサー回路の電源ON/OFF制御をする場合は改造した標準アプリを書き込みます。そうでない場合は標準アプリを使います。
改造標準アプリ => ダウンロード
改造内容はこちらを参照ください。 => 参照
(Tagアプリ使用の場合)
親機子機共にTWELITEにTagアプリを書き込み、インタラクティブモードで次の設定をします。
・親機はオプションビット設定でアスキー出力設定(0x00000100 )を可能にする。
・子機はセンサ種別の設定を0xFE にし、「中継パケットの表示」を無効(0x00000000)にする。(これは中継器を使っている時に 子機からの直接波と中継波の両方が親機に届いた場合、親機のTWELITEが直接波のパケットと中継器からのパケットの両方を出力し、それを処理するマイコンがビジーになるので 一方のみにするためです。)
<中継器>
子機からの電波は壁やアルミフィルム付き断熱材で家の中には届きづらいことがあり、実使用では親機から見通せるような屋外の近い所に中継器を置くことが必要なケースもあります。
ACアダプターで電源供給する場合の中継器回路図とソーラー電源を使った中継器回路図をこちらに示します。
中継器のTWELITEのアプリタイプ(標準アプリかTagアプリか)は親機子機と合わせ、中継器用アプリを書き込むか或いは中継器用設定にしてください。
ACアダプター電源供給の場合の構造はシンプルなので回路を適当なケースに収納してください。ただ、屋外に置く場合は防水対策をきちんとしないとトラブルが起きます。
ソーラー電源を使った中継器については「太陽電池を使ったMONO TWELITE中継器の製作」を参照願います。
<後記>
この記事は製作することを主眼を置いて書いたので回路やソフトの詳細には触れていませんが、関連記事には若干詳しく書いてありますので必要でしたらそちらを参照願います。
今後はこれまで書いた記事への追加・修正、実験結果の書き込み、場合によってはソフトウェアのアップデートなどを行い、基本的にはこれで当プロジェクトは終了します。
タイトルは「猿検知通報装置」ということで始めましたが他の動物や人間に対しても検知でき、実験目的ではありますが今は私の家の周りには7個もセンサーがあり来訪者を検知しています。(その上ミリ波レーダーやLED動物撃退器も2個あり、近隣から不審人物に思われているかも知れません。)
定年退職後のボケ防止と、もしまた仕事があったらと思い 技術や知識を忘れないためにやってきましたが、元々のめりこみ易い性格なので次から次といろいろ検討をやってしまって切りがないので、今回終了宣言をして幕引きをしたいと思います。
一連の記事が少しでも皆様のお役に立てれば幸いです。 (2020.08.11)
===== 関連記事 =====
猿検知通報装置の製作
猿検知通報装置の製作(電池寿命改善品)
猿検知装置用センサーの代替品
猿検知通報装置 新子機製作
太陽電池を使った動物センサー子機の製作
猿検知通報装置関連まとめ
---親機製作---
ESP8266を使った猿検知通報システム親機の製作
Raspi3&3.5"Monitor一体型ユニットの製作
Arduino Nano互換機を使った簡易型親機の製作
ESP32を使った猿検知通報システム親機の製作
ESP32 & 2.8" G_LCD一体型ユニットの製作(2)
>> ブログ記事一覧へ
<センサー子機>
(子機回路)
センサー子機回路に関しては改良をしながらいくつか紹介したので混乱しやすかったと思います。
また、これまで電池2系統持ったりセンサーを仕様外の電圧で使用するという事がありましたが、これらも解決して最終的な回路にしました。 => 参照
ちょっとバリエーションが多いですが。
<2023.01.18追記>
「PaPIRs焦電センサーを使った無線子機の製作(最新仕様)」で、子機の小型化、ソーラー電源化を含めた内容を書きました。
<2023.06.20追記>
自作センサー回路につきましては「自作焦電センサー回路を使った動体検知」で最新仕様の回路を紹介しています。
<追記終わり>
(センサー)
自作センサー回路では超高感度フレネルレンズAE-01(AK-FL1)を用いていたのですが、検出距離は大きいものの視野角が比較的広いので目標ゾーンを狭めるためにレンズ前に遮光筒を付けた事と回路が大きめになったためにケースが大きくなりました。(「猿検知通報装置 新子機製作」参照)
その後この超高感度フレネルレンズが入手できない事態になり、代替品として見つけたのがPanasonicのEKMC1603111です。
これは検出距離は人間(大人)で10数メートルと自作回路品(20数m)より短くなりますが、検出回路内蔵のデバイスなので回路をシンプルにでき、またマルチレンズの中央の一つのレンズを使うようにすることで検出範囲が絞られるのでレンズ前の遮蔽距離を短くできてケースを小さめにできます。市場購入が可能で検出性能と回路性能も良いので今後はこれか、シリーズ品のEKMC1604111、EKMB1303111K等を使いたいと思っています。(EKMC1603111 以外は値段がちょっと高いかもしれません。今回使ったEKMB1303111Kは秋月電子でEKMB1301111K(1,080円)とEKMC1603111(520円)を購入し、前者のセンサーと後者のレンズを組み合わせて作ったものです。)
レンズ取り付け向き変更の改造は必要です。 改造内容などはこちらを参照願いいます。
<2023.07.02追記>
PaPIRsは草木の揺れや入射光による誤検出が少ないようです。 PaPIRsの2センサー検出については「猿検知装置用センサーの代替品」を参照願います。<追記終わり>
(ケース収納)
子機のケースは主にセンサーのタイプと数、電池寿命(電池サイズ)、ソーラー電源かどうかによって形状や大きさが決まります。
<参考> 塩ビパイプ(VU管)への電池収納形態 (2022.11.08追加)
ソーラーパネル電源を用いた子機を円筒形にしたのは、センサーの向きとアンテナの位置関係を固定せずアンテナの影がソーラーパネル上にあまり出来ないような向きにアンテナ位置を持ってこられるからです。
電池を用いた子機のケースは円筒形であっても角型形状であってもよいのですが、加工面では角型の方がしやすかったです。
ケース加工については後述の「最新の子機製作例」を参考にできると思います
(標準アプリかTagアプリか)
TWELITEを猿検知通報システムに使う際には標準アプリとTagアプリのいずれかのアプリケーションを使う事になります。
標準アプリでは検出イベントが起きた時以外にA/Dデータなどを定期的に親機に送る機能(初期設定では5秒に一度)があり、更にその際に親機のDIデータを子機に送る事もできます。
これによって子機の電源電圧を監視でき、子機のセンサー回路の電源を夜間はOFFするといったことも可能になります。
(自作回路では親機からセンサー毎に検出感度を2,3ステップで切り替えられるようにすることも考えていましたが、回路が複雑になるのでやめました。また、PanasonicのセンサーICではそもそも感度切り替えが出来ません。)
一方Tagアプリではイベントが発生した時のみ親機にデータを送るようになっているので、消費電力は減りますが電圧の監視には不向きです。また 親機から子機にデータを送って子機を制御するようなことはできません。
更にTWELITEに4つあるDI端子のうち1つ(使い方によっては2つ)しか検出用に使えず、今回は抵抗分割でセンサー毎に異なる電圧をアナログ入力端子に加えて親機が判別できるようにしました。(標準アプリでは4つのDI端子に個別にセンサーを繋げられた。)
ソーラーパネルを電源に用いた回路では少しでも消費電力を減らして蓄電しようという意図からTagアプリを使いました。
(最新の子機製作例)
乾電池を使った場合と、ソーラー電源を使った場合の最新の製作例を紹介します。

乾電池を使った角型子機の製作 => 参照
ソーラー電源を使った円筒型子機の製作 => 参照
EKMB1303111Kを使った円筒型子機の製作 => 参照 (2020.11.7追加)
参考:乾電池2本化した円筒型子機 => 参照 (2022.12.07追加)
他のプロジェクト用子機ですが類似回路のもので、構造の参考になります。
ソーラー電源バージョンはこちらの記事の物です。
検証の結果、南向きで晴れた日には直射日光が3.5時間以上当たるような設置をした場合 電源のメンテナンスフリー化ができそうです。
乾電池バージョンではセンサー部と送信部のユニット化をし、これによって作りやすくなりました。
EKMB1303111Kを使った猿検知用子機(2センサー検出)の実験機を作り 単四電池を使い電池寿命試験をしたところ4か月以上は十分持ちそうな様子ですので、容量が単四の3倍程度はあるという単三電池を使えば1年以上持つと思われます。 そこで単三電池を使った子機をできるだけ小さく作ってみました。
<親機とソフトウェア>
(ハードウェア)
猿検出通報装置の親機は使用するボードPCよって
1. Raspberry pi3
2. ESP-WROOM-02開発ボード(ESP8266)
3. Arduino Nano または互換機
//2012.01.07 追記
4. ESP32 (キャラクターLCD)
5. ESP32 (2.8"グラフィックLCD)
詳細はリンク記事を参照願います。 //
Raspberry pi ではグラフィック画面上に簡単なマップを表示しそこに検知点を表示できます。
ESP8266では検知点番号に対応するLEDと20文字x4列キャラクターLCDに英数字とカタカナで検知点情報表示できます。
Arduino Nano/互換機では 4つのLEDで検知点を示します。
基本機能表

プログラミングの勉強がてら3種類作りましたが、Raspberry piが一番実用的だと思います。
ESP8266のキャラクターLCD表示は半角カタカナ表示では瞬時に理解するのが難しく、むしろ英語の方が良いぐらいです。
Raspberry piを使った場合とESP8266を使った場合の親機の製作コストは、個人がデバイスを購入して作る場合は余り差がなかったと思います。
Arduino Nano/互換機は検知点数が少ない時(4ヵ所以下)に安価にできる親機として作りました。
<製作方法>
ハードウェア製作方法は次の記事を参照してください。
1. Raspberry pi3 => Raspi3&3.5"Monitor一体型ユニットの製作
2. ESP-WROOM-02(ESP8266) => ESP8266を使った猿検知通報システム親機の製作
3. Arduino Nano または互換機 => Arduino Nano互換機を使った簡易型親機の製作
(ソフトウェア)
親機にインストールするソフトウェアは子機のハードウェア構造によって異なります。
こちらの資料p2の表によって選択します。
<2020.09.26> ソフトウェアによっては修正が必要ですので、こちらを参照願います。
・ソフトウェアのダウンロード先
a) TWELITE標準アプリ使用の場合
Raspberry pi3 => ダウンロード (2022.07.28情報更新)
ESP-WROOM-02(ESP8266) => ダウンロード
Arduino Nano/互換機 => こちらから標準アプリ対応版をダウンロード
b) TWELITE Tagアプリ使用の場合
Raspberry pi3 = ダウンロード
ESP-WROOM-02(ESP8266) => ダウンロード
Arduino Nano/互換機 => こちらからTagアプリ対応版をダウンロード
・使用方法・設定方法などの説明
a) TWELITE標準アプリ使用の場合
関連記事内のソフトウェア、使用方法、設定などの項目を参照してください。
Raspberry pi3 => 猿検知通報装置の製作 および 猿検知通報装置の製作(電池寿命改善品)
ESP-WROOM-02(ESP8266) => ESP8266を使った猿検知通報システム親機の製作
Arduino Nano/互換機 => Arduino Nano互換機を使った簡易型親機の製作
b) TWELITE Tagアプリ使用の場合
ダウンロードしたソフトウェアパッケージ内にドキュメントがあります。
<TWELITE (DIP)のプログラムと設定>
TWELITEにプログラムを書き込んだりインタラクティブモードで設定をする際にはTWELITE Rが必要です。
インタラクティブモードについてはこちらを参照。
(標準アプリ使用の場合)
必要に応じて子機のTWELITEに標準アプリを書き込み(購入時は標準アプリになっている)、インタラクティブモードで次の設定をします。
(1) 子機を特定するのに論理デバイス番号を使う場合は1から順に付ける。 個体識別番号(シリアル番号)で特定する場合は不要。
(2) 子機間欠1秒モードの間欠時間を 10,000ms に設定する。
(3) オプションビット設定でDI1 ~ 4 のプルアップ停止する。(設定値 0x00000800)
親機のTWELITEは、親機から子機のセンサー回路の電源ON/OFF制御をする場合は改造した標準アプリを書き込みます。そうでない場合は標準アプリを使います。
改造標準アプリ => ダウンロード
改造内容はこちらを参照ください。 => 参照
(Tagアプリ使用の場合)
親機子機共にTWELITEにTagアプリを書き込み、インタラクティブモードで次の設定をします。
・親機はオプションビット設定でアスキー出力設定(0x00000100 )を可能にする。
・子機はセンサ種別の設定を0xFE にし、「中継パケットの表示」を無効(0x00000000)にする。(これは中継器を使っている時に 子機からの直接波と中継波の両方が親機に届いた場合、親機のTWELITEが直接波のパケットと中継器からのパケットの両方を出力し、それを処理するマイコンがビジーになるので 一方のみにするためです。)
<中継器>
子機からの電波は壁やアルミフィルム付き断熱材で家の中には届きづらいことがあり、実使用では親機から見通せるような屋外の近い所に中継器を置くことが必要なケースもあります。
ACアダプターで電源供給する場合の中継器回路図とソーラー電源を使った中継器回路図をこちらに示します。
中継器のTWELITEのアプリタイプ(標準アプリかTagアプリか)は親機子機と合わせ、中継器用アプリを書き込むか或いは中継器用設定にしてください。
ACアダプター電源供給の場合の構造はシンプルなので回路を適当なケースに収納してください。ただ、屋外に置く場合は防水対策をきちんとしないとトラブルが起きます。
ソーラー電源を使った中継器については「太陽電池を使ったMONO TWELITE中継器の製作」を参照願います。
<後記>
この記事は製作することを主眼を置いて書いたので回路やソフトの詳細には触れていませんが、関連記事には若干詳しく書いてありますので必要でしたらそちらを参照願います。
今後はこれまで書いた記事への追加・修正、実験結果の書き込み、場合によってはソフトウェアのアップデートなどを行い、基本的にはこれで当プロジェクトは終了します。
タイトルは「猿検知通報装置」ということで始めましたが他の動物や人間に対しても検知でき、実験目的ではありますが今は私の家の周りには7個もセンサーがあり来訪者を検知しています。(その上ミリ波レーダーやLED動物撃退器も2個あり、近隣から不審人物に思われているかも知れません。)
定年退職後のボケ防止と、もしまた仕事があったらと思い 技術や知識を忘れないためにやってきましたが、元々のめりこみ易い性格なので次から次といろいろ検討をやってしまって切りがないので、今回終了宣言をして幕引きをしたいと思います。
一連の記事が少しでも皆様のお役に立てれば幸いです。 (2020.08.11)
===== 関連記事 =====
猿検知通報装置の製作
猿検知通報装置の製作(電池寿命改善品)
猿検知装置用センサーの代替品
猿検知通報装置 新子機製作
太陽電池を使った動物センサー子機の製作
猿検知通報装置関連まとめ
---親機製作---
ESP8266を使った猿検知通報システム親機の製作
Raspi3&3.5"Monitor一体型ユニットの製作
Arduino Nano互換機を使った簡易型親機の製作
ESP32を使った猿検知通報システム親機の製作
ESP32 & 2.8" G_LCD一体型ユニットの製作(2)
>> ブログ記事一覧へ



